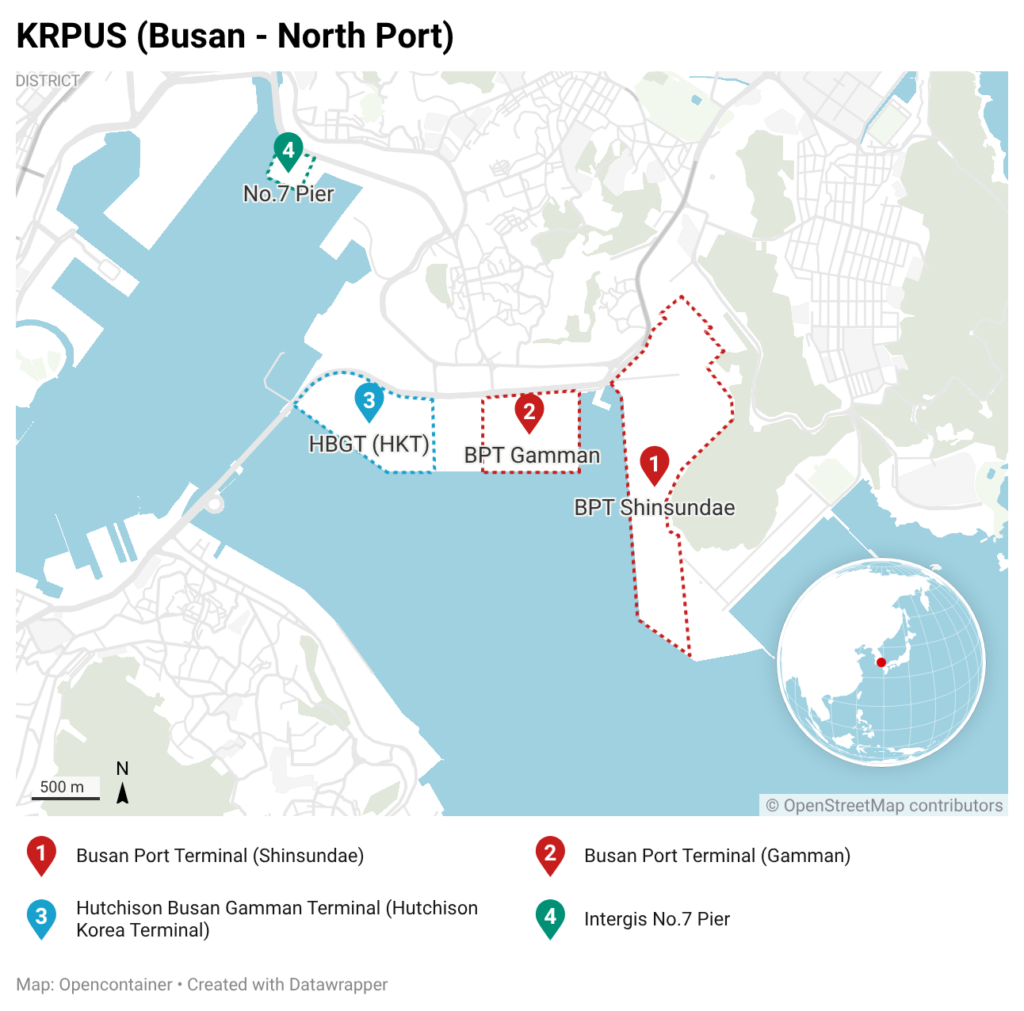
BPT Sinseondae-Gamman Terminal at Busan Port has recently introduced additional ARMGC units.
* ARMGC stands for Automated Rail Mounted Gantry Crane. It is an automated yard crane that runs on rails and handles containers in the yard without an onboard operator.
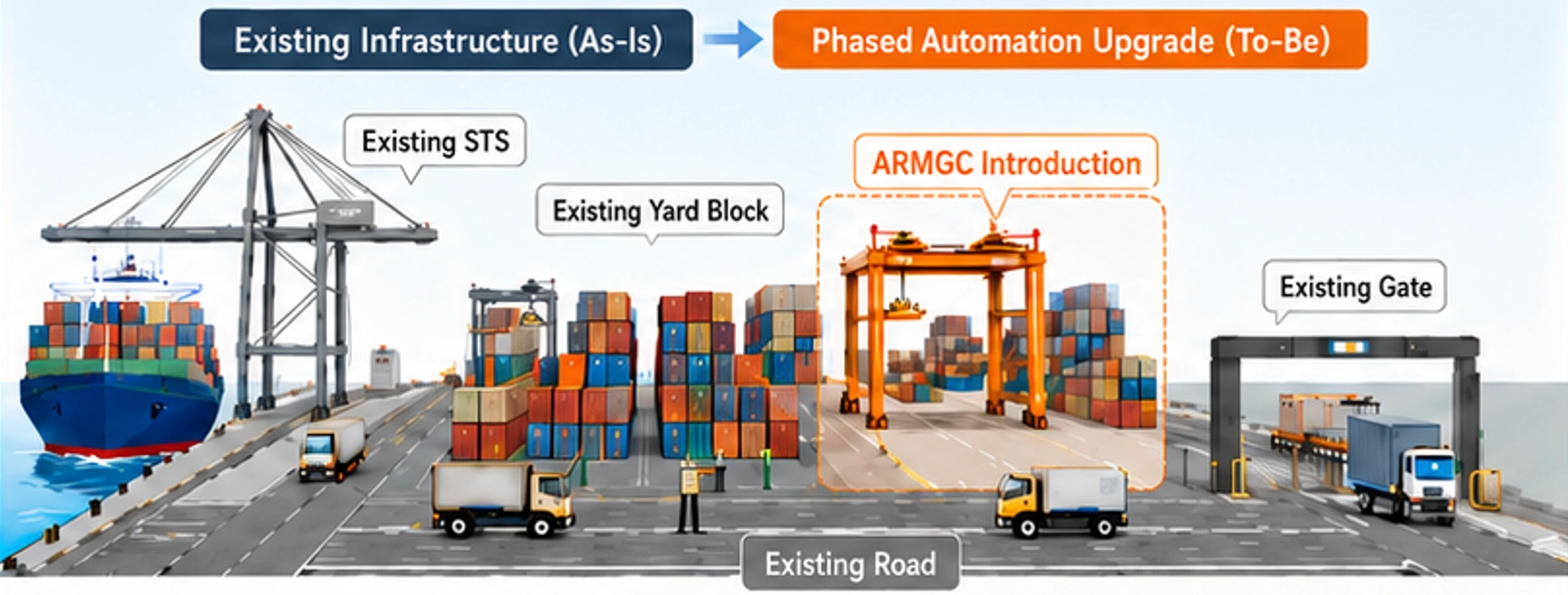
At first glance, this may look like a simple equipment upgrade, with several new automated yard cranes being added to the terminal. However, from the perspective of port operations, BPT’s ARMGC deployment means much more than just adding more equipment.
Existing terminals such as BPT were not originally designed as fully automated terminals from the beginning. They are facilities that evolved beyond the limitations of conventional container terminals into modern on-dock terminals, where container stacking, storage, gate-in/gate-out, and related terminal functions are handled within the terminal.
Now, these terminals are facing another turning point.
The key question is how existing on-dock terminals can adapt to the era of fully automated terminals.
BPT’s ARMGC deployment is one realistic answer to that question. Instead of demolishing and rebuilding the physical structure of the existing terminal, it seeks to raise productivity and automation levels as much as possible within the constraints of an operating terminal.
From a port development perspective, this can be seen as a case of brownfield automation — improving existing facilities step by step while keeping the terminal in operation.
1. From Conventional Terminals to On-dock Terminals
Conventional container terminals in the past were not as tightly integrated as today’s terminals, where berth, yard, gate, and storage functions operate as part of one connected system.
At that time, the core function of a terminal was mainly quay-side cargo handling — loading and discharging containers from vessels. Containers discharged from vessels were often moved to separate off-dock container yards or external storage areas, rather than being stored for a sufficient period inside the terminal.
CFS operations and container repair work were also generally handled through separate facilities, rather than being processed within the terminal itself.
In other words, conventional terminals were closer to cargo-handling spaces where containers briefly passed between vessels and inland transport. Rather than functioning as terminals with enough internal buffer capacity, they were structured around transferring containers to off-dock yards or related external facilities after vessel operations.
However, as container volumes increased and vessels became larger, it became difficult to maintain stable logistics flows by simply discharging containers from vessels and moving them outside the terminal.
To improve vessel operation productivity, terminals needed a structure that could store containers inside the terminal for a certain period, adjust the sequence of container delivery and receipt, and connect yard, gate, and berth operations into one integrated flow.
This is how the modern on-dock terminal emerged.
An on-dock terminal is not just a cargo-handling space. It is closer to an all-in-one concept, where vessel operations, yard stacking, gate-in/gate-out, storage functions, CFS operations, and even container repair work are handled in an integrated manner within the terminal or adjacent areas.
The key point of this transition is that the terminal changed from a simple cargo-handling point into a space with buffer capacity that can absorb and adjust logistics flows.
Sufficient yard space and stacking capacity absorb the time gap between vessel operations and inland transport. If CFS operations and container repair functions are also located nearby, containers can undergo the necessary follow-up processes without leaving the terminal.
As a result, the terminal evolved from a simple passage point for containers into an operational platform that coordinates and stabilizes logistics flows.
2. Why On-dock Terminals Need to Evolve Again
On-dock terminals were highly modern port systems by the standards of their time.
They were far more efficient than older conventional terminals because they could store containers inside the terminal, manage container delivery and receipt, and connect vessel operations with inland transport.
However, the port environment is changing once again.
Vessels have become larger, and the number of containers that must be handled at one time has increased. Terminals now need to handle more containers in a shorter period, reduce yard congestion, improve cargo-handling productivity, and enhance operational safety.
At the same time, demand is also growing for labor stability, safer night operations, energy efficiency, carbon-emission reduction, and data-driven operations.
Today, terminal competitiveness is no longer determined simply by having a large yard and many pieces of equipment.
What matters now is how stably, predictably, and efficiently a terminal can handle more containers within the same physical space.
This is where existing on-dock terminals face a new challenge.
They have already evolved once from conventional terminals into modern terminals. Now, they must evolve again in response to the new benchmark of fully automated terminals.
3. Why Full Automation Is Difficult to Apply Directly to Existing Terminals
Newly built automated terminals are designed for automation from the very beginning.
Yard block layout, equipment travel routes, unmanned transport vehicle paths, power supply systems, communication networks, sensors, safety fences, gate processes, and TOS integration are all designed around automated operations.
These terminals are close to greenfield automated terminals, built from scratch on vacant sites based on the requirements of automation. Because the entire layout can be standardized around systems, they can be designed from the beginning to support unmanned equipment and automated operations.
Existing terminals are different.
Terminals such as BPT are port infrastructure assets that have already been in operation for many years. Their berth locations, yard structures, gate positions, internal roads, equipment routes, power infrastructure, existing rail structures, and hinterland connections have all been formed within existing operating conditions.
To convert such a terminal into a fully automated terminal, simply replacing equipment is not enough.
The yard pavement must be reworked, equipment rails must be rearranged, and routes for unmanned transport equipment must be secured. Interference between manned and unmanned equipment must be eliminated, and sensors, communication networks, safety zones, and power supply systems must also be rebuilt.
In effect, it is close to rebuilding the terminal while continuing to operate it.
However, container terminals are core infrastructure that support national logistics around the clock. It is not realistic to stop operations for an extended period to carry out large-scale construction. A shutdown would affect vessel schedules, import and export logistics, inland transport, and hinterland warehouse operations.
For existing terminals, therefore, “automation that can be implemented without stopping operations” is more important than “ideal automation.”
This is the reality of automation for existing terminals.
4. The Core of Existing Terminal Automation Is Not Full Unmanned Operation
Automation of existing terminals cannot easily be approached by making every area unmanned at once.
To automate the quay, transport, yard, and gate all at the same time, the entire terminal structure would need to be changed. The quay and transport areas, in particular, involve many variables. Vessel operation conditions, external vehicles, manned equipment, worker movements, and emergency situations are all closely intertwined.
By contrast, the yard is an area where the effect of automation is relatively clear.
In the yard, containers are stacked within defined blocks, and the work of receiving, delivering, and re-handling containers is repeated according to planned sequences. The work pattern is relatively standardized, and the operating range of equipment is limited.
For this reason, the yard is the most realistic area for existing terminals to begin their automation transition.
This is where ARMGC has significant meaning.
ARMGC runs on rails and performs container stacking and delivery/receipt operations within yard blocks on an automated or remote-control basis. It can handle work previously performed by manned RTGCs or RMGCs in a more standardized and stable way.
In this structure, quay operations and horizontal transport continue to be handled by existing manned equipment, while repetitive yard operations are handled by automated equipment.
This is the basic direction of a semi-automated terminal.
Areas that require human flexibility remain under human operation, while areas that require repetition and precision are handled by automated equipment and systems.
5. The Meaning of BPT’s ARMGC Deployment
BPT’s ARMGC deployment should be understood within this broader context.
This is not simply a replacement of old equipment with newer equipment. It is a strategy to raise the level of automation by focusing on the yard — the area where productivity can be most effectively improved within the physical limitations of an existing on-dock terminal.
In a container terminal, the yard is not merely a storage area.
The yard is a critical zone that affects both berth productivity and gate efficiency. If container positions become disorganized in the yard, vessel operations are delayed, truck waiting times increase, and unnecessary re-handling work grows.
Conversely, when yard operations are stable, the entire terminal flow becomes smoother. When vessel planning, delivery and receipt sequences, container locations, and equipment allocation begin to work together systematically, a terminal can achieve higher throughput within the same space.
ARMGC deployment is aimed at improving this stability and predictability in yard operations.
In particular, automated yard equipment does not simply mean equipment without an onboard operator. Once equipment is connected to a system, work instructions, location data, stacking plans, travel routes, and job sequences are managed based on data.
This changes the way the terminal operates.
In the past, operational quality depended heavily on field experience and the judgment of operators. Going forward, TOS, equipment control systems, yard planning, and real-time data will become the core of operational quality.
In this sense, ARMGC deployment is not just crane automation. It is the systemization of terminal operations.

- Developed from scratch on a vacant site
- Terminal layout designed around automation
- Integrated construction of AGVs, automated yards, sensors, and communication networks
- Advantageous for implementing fully automated terminals
- High design flexibility / high initial investment
- Upgrading and modernizing an existing operating terminal
- Maximizing the use of existing facilities, yards, roads, and gate structures
- Improving step by step while maintaining operations
- Suitable for yard-focused semi-automation
- Significant layout constraints / minimizing operational interruption is critical
6. ARMGC Installation Process
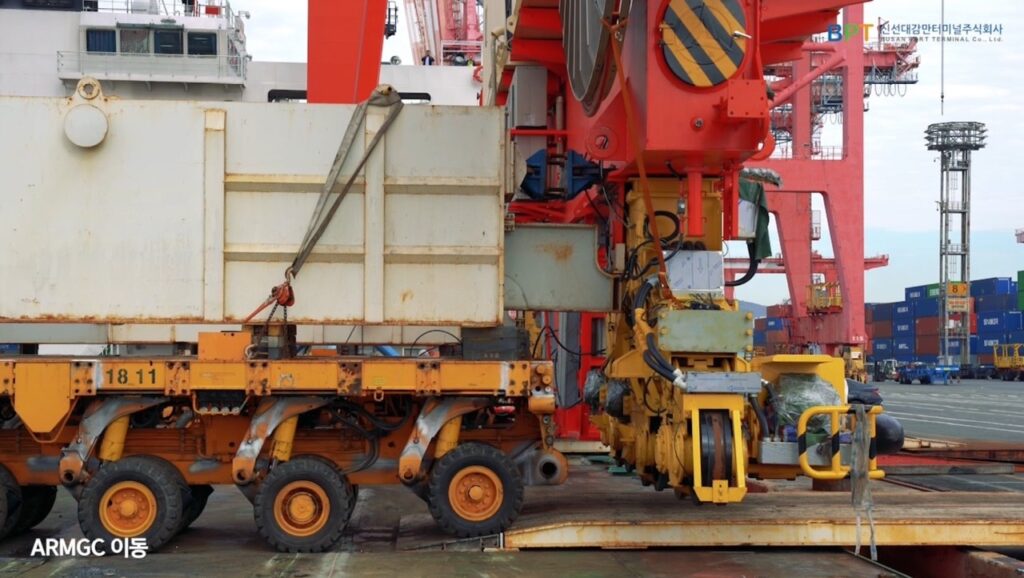
Large equipment such as ARMGC is often transported by vessel after being largely assembled at the manufacturing site, rather than being fully assembled on site. It is then brought into the terminal by barge and discharged using a roll-off method with SPMTs and transport beams.
This is not a simple cargo-handling operation. It is a highly engineered process.
BPT provided a video showing the ARMGC installation process, making it possible to summarize the rarely seen process of bringing in and installing these large cranes.
Step 1: Preparation & Entry

① A special barge carrying the crane berths alongside the quay.
② Considering the tidal range and barge height, ballast is adjusted to level the barge with the quay.
③ Rails are installed between the barge and quay so that the ARMGC can move ashore.
④ The SPMT, a multi-axle special transport vehicle waiting on the quay, enters the barge.
Step 2: Fastening the Transport Beam

① The SPMT moves underneath the ARMGC.
② A transport beam is installed to connect the crane and SPMT as one unit.
③ The large steel transport beam is inserted into the lower leg structure of the ARMGC and securely fastened using high-strength bolts and locking devices.
* The transport beam acts like a “spine” that distributes the crane’s weight evenly across the SPMT. Without the beam, the load may concentrate on only a few points, potentially damaging the crane structure.
Step 3: Jack-up & Lifting

① Once the transport beam is fastened, the hydraulic system installed on the SPMT is activated.
② The hydraulic cylinders of the SPMT gradually push up the transport beam, slowly lifting the entire ARMGC, which weighs hundreds of tons, from the ground.
③ The ARMGC’s own wheels are lifted off the ground, and the entire load is supported by the SPMT through the transport beam.
Step 4: Roll-off & Land Transport
① The SPMT carrying the ARMGC slowly moves from the barge toward the land side in a roll-off operation.
② As the load moves ashore, the center of gravity shifts rapidly, creating a force that may cause the barge to rise. This is controlled through real-time ballast adjustment.
③ Once fully ashore, the SPMT carries the ARMGC suspended by the transport beam to the designated yard block.
Step 5: Positioning & Set-down

This is the stage that requires the highest level of precision.
① Alignment: The SPMT moves over the pre-installed gantry rails in the yard so that the wheels of the suspended ARMGC are precisely aligned with the rails on the ground.
② Set-down: Once the position is correct, the hydraulic system of the SPMT is gradually lowered so that the ARMGC wheels gently settle onto the rails.
③ Unfastening: After the crane is safely seated on the rails, the transport beam is detached from the crane and the SPMT is removed.
Step 6: Commissioning

① The cable reel for power supply is connected, along with the fiber-optic communication network.
② Operation begins after TOS integration tests, sensor calibration, and load testing.
Why Is a Transport Beam Used?
Although an ARMGC is a very large structure, it can be vulnerable to torsion because of its inverted U-shaped structure.
The transport beam acts as a support frame that holds the crane’s shape firmly during movement. At the same time, it distributes the load over a wider area, making safe transport possible.
For this reason, the transport beam is an essential piece of equipment in the ARMGC installation process.
7. Semi-automation Is Not an Inferior Form of Full Automation
Semi-automation is often understood simply as an intermediate stage that is less advanced than full automation.
However, from the perspective of existing terminals, semi-automation can be a highly realistic form of optimization rather than just a transitional phase.
Fully automated terminals require new sites, standardized layouts, large initial investment, and long stabilization periods. Existing terminals, on the other hand, already have operating berths, equipment, customers, labor structures, and hinterland transport networks.
Under these conditions, it is more reasonable to improve the areas where automation can deliver the greatest benefit first, rather than trying to change everything at once.
In this approach, human flexibility is maintained in quay and transport operations, while yard operations are standardized through automated equipment and systems. This is not so much a technological compromise as it is the most practical form of evolution available to existing terminals.
Ultimately, the essence of semi-automation is not that it is “less automated.”
It is about redefining the roles of people and systems within the physical constraints of an existing terminal.
It means distinguishing between the areas where people perform best and the areas where machines perform best, and then improving overall operational efficiency by using the strengths of both.
8. Where Will the Competitiveness of Existing Terminals Come From?
In the future, port competitiveness will not be determined simply by berth length, the number of cranes, or yard area.
What will matter is how many more containers can be handled within the same space, how much operational variability can be reduced, and how predictably yard congestion can be managed.
Existing terminals, in particular, cannot compete with new automated terminals in exactly the same way. They cannot easily achieve the same structure as terminals that were designed for full automation from the beginning.
Therefore, the competitiveness of existing terminals must come from a different approach.
That approach is to combine operational experience, location advantages, an existing customer base, skilled personnel, and step-by-step automation.
When automated yard equipment such as ARMGC, advanced TOS, data-driven yard planning, remote control, and optimized equipment operation are added to this foundation, existing terminals can still achieve significant productivity improvements.
In other words, the future of existing terminals does not lie in simply copying fully automated terminals.
It lies in finding an automation model that fits their own conditions.
BPT’s ARMGC deployment shows one example of that direction.
9. Conclusion: The Second Evolution of Existing Terminals
BPT’s ARMGC deployment is not simply the addition of the latest automated equipment.
It is a scene that shows existing port infrastructure, which once evolved from a conventional terminal into an on-dock terminal, changing once again to adapt to the era of automation.
In the past, conventional terminals were mainly spaces for vessel loading and discharging. Container storage, CFS functions, and container repair functions depended on off-dock yards or separate facilities. Later, on-dock terminals developed into all-in-one platforms that could handle stacking, storage, gate-in/gate-out, CFS operations, and container repair work within the terminal.
Now, existing on-dock terminals are being asked to evolve once again in response to the new benchmark of fully automated terminals.
However, this evolution does not mean designing everything from scratch, as in the case of a new terminal. It means maintaining the physical conditions of an operating terminal while improving the areas where automation can have the greatest impact.
At the center of this approach is yard automation, and one of its representative pieces of equipment is the ARMGC.
If full automation is the future, semi-automation is the realistic path that allows existing terminals to move toward that future.
BPT’s ARMGC deployment is one scene from this realistic transition.
Existing terminals can no longer remain in the past. At the same time, not every terminal can become fully automated all at once.
Therefore, the key question going forward is not simply “full automation or not.”
The real question is how far each terminal can automate within its physical constraints, and how it can improve productivity under those conditions.
BPT’s case provides an important hint in answering that question.
The future of existing terminals does not lie in envying new terminals.
It lies in identifying the automation that is possible within their own structure, and redesigning the roles of people, equipment, and systems accordingly.
That is the essence of automation for existing on-dock terminals, and it is the most important meaning of BPT’s ARMGC deployment.